 详情内容
详情内容
content details
在进行 “缺陷地图” 管理时,需先完成设备初始化,包括初始化摄像头(配置 ip 地址、登录账号、密码、流地址等)、皮带信息(设定长度、速度以建立二维坐标系,为缺陷定位和地图构建奠定基础)、上层服务器信息及巡检计划;随后通过边缘定位模块定位皮带边缘坐标(可存储并读取以提升算法表现),借助皮带连接处或人工标记定位确定巡检起止点(连接处有明显辨识度则用其定位,无则人工标注色差明显且面积足够的标记);在地图构建上,采用两种拼接方式,一是利用深度学习算法将录制的巡检视频转为皮带缺陷地图,二是若拼接算法失效,根据皮带运行速度控制巡检视频抽帧速度来建立地图,同时对地图进行坐标系建立与裁剪;地图生成后,可在其上标注识别出的皮带撕裂、表皮脱落、连接开口等缺陷的位置,并展示缺陷面积、大小等参数,还会关联巡检报告表(记录缺陷地图地址等信息),当缺陷面积或连接处开口大小超过设定阈值,或同一位置缺陷变化率超过阈值时,会触发告警,且用户能通过手机端 APP 外网访问,在线观看存储在服务器上的缺陷地图及巡检视频,查看相关巡检信息。

 抖音
抖音
 微信
微信




 当前位置:
当前位置:

 推荐产品
推荐产品 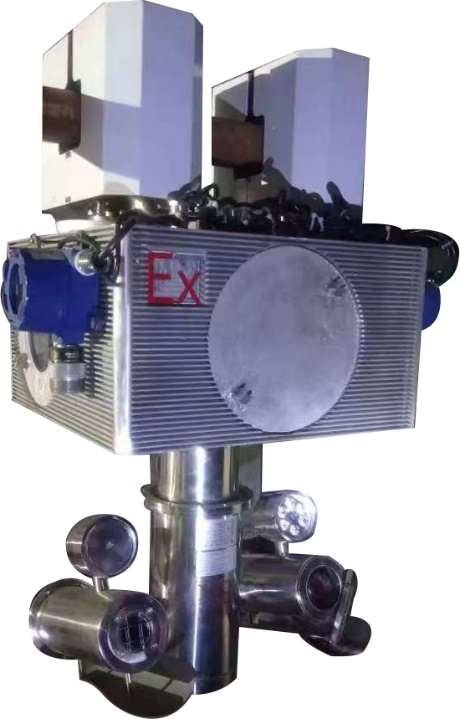





 推荐新闻
推荐新闻 
 在线留言
在线留言

 营业执照
营业执照